
L'approche de planification de mouvement neuronal (Neural Motion Planning) permet aux robots de naviguer autour d'obstacles complexes dans des environnements inconnus. Développée par une équipe de l'institut de robotique de l'université Carnegie Mellon, cette méthode utilise un réseau d'intelligence artificielle unique et polyvalent pour effectuer la planification de mouvement dans divers contextes domestiques. Elle vise à améliorer la capacité des robots à interagir avec des objets dans des environnements comme des placards, des lave-vaisselle et des réfrigérateurs, même s'ils ne les ont jamais rencontrés auparavant.
Le robot s’inspire de l’humain
La planification de mouvement, le processus par lequel un robot est entraîné à se déplacer d'un point à un autre sans heurter d'obstacles, est généralement complexe et lente. Lorsqu'une personne saisit un verre sur une table, elle évite intuitivement les autres objets présents. Pour un robot, ce simple geste nécessite de nombreux calculs et vérifications de collision, ce qui peut ralentir considérablement l'exécution de la tâche.
Le Neural Motion Planning cherche à résoudre ce problème en utilisant l'apprentissage profond. Les robots sont ainsi exposés à des environnements variés et doivent accomplir des tâches complexes, comme manipuler des objets tout en évitant de nombreux obstacles.
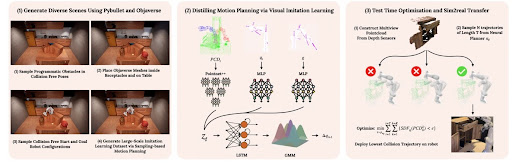
Les 3 étapes pour créer un Neural Motion Planner : générer les données, entraîner les modèles d’IA, optimiser l’inférence
Ces expériences leur permettent d'acquérir progressivement des compétences et d'améliorer leur réactivité. Par exemple, les chercheurs ont simulé des millions de configurations domestiques où les robots ont dû naviguer autour de meubles, d'appareils électroménagers, voire d'objets aléatoires comme des vases ou des animaux de compagnie. Ces simulations ont été condensées en une politique générale, permettant aux robots de s'adapter efficacement à de nouvelles situations lorsqu'ils sont déployés dans le monde réel.
Un gain d’autonomie
Dans le cadre des expérimentations en laboratoire, un bras robotique équipé de ce système a été testé dans des environnements inconnus. Les chercheurs ont utilisé des caméras de profondeur pour créer une représentation tridimensionnelle de la scène, identifiant ainsi le point de départ du bras et la position souhaitée pour l’achèvement de la tâche. Neural Motion Planning a ensuite déterminé les configurations articulaires nécessaires pour déplacer le bras du point initial au point final tout en évitant des obstacles tels que des lampes, des plantes ou des portes de placard ouvertes.
Grâce à cette approche, le robot a démontré une capacité d'adaptation et une flexibilité accrues dans des environnements domestiques variés, évitant avec succès de nombreux types d'obstacles. Cela représente un pas en avant significatif dans la quête de systèmes robotiques capables de fonctionner dans des conditions réelles et imprévisibles.
Pour en savoir plus :
- Murtaza Dalal et al., Neural MP: A Generalist Neural Motion Planner, Arxiv, Sept. 2024
- Tech Xplore